1. Inclusion de la bibliothèque Servo
Bibliothèque permettant de simplifier le contrôle des servomoteurs en fournissant des fonctions prêtes à l'emploi.
#include
2. Déclaration des objets et variables
Servo servo1, servo2, servo3, servo4;: Objets représentant chaque servomoteur.
int potPin1 = A0;: Broche où le signal du potentiomètre est connecté.
int val_1;: Variable de stockage pour les données du potentiomètre.
3. Configuration initiale (configuration nulle)
servo1.attach(2);: Connectez le servomoteur à la broche 2 de l'Arduino.
Serial.begin(9600);: Initialiser la communication série afficher des données.
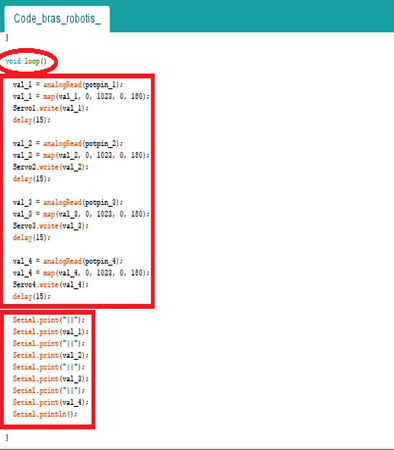
4. Boucle principale (boucle vide)
val_1 = analogRead(potPin1);: Lecture de la valeur du potentiomètre.
val_1 = map(val_1, 0, 1023, 0, 180);: Conversion des données en un angle compris entre 0° et 180°.
servo1.write(val_1);: Commande le déplacement du moteur selon l'angle.
delay(15);: Pause pour stabiliser les mouvements.
5. Affichage des données en temps réel
Serial.print("Angle: ");: Affiche la valeur calculée sur le moniteur série.








Post a Comment
Your email address will not be published. Required fields are marked *